Appleの研究者が、自律システムに関係する3Dオブジェクト検出の研究論文を発表
Appleの研究者が、自律システムに関係する3Dオブジェクト検出の研究論文を発表しました。Appleは、自立運転システムの開発を行っていることを明らかにしており、今回の研究はその分野に関連した研究です。
今回発表された論文は、AI研究者であるYin Zhou氏と同社のマシンラーニング研究者であるOncel Tuzel氏が執筆したものです。
論文では、3Dオブジェクト検出のためにLiDAR(Light Detection and Ranging、Laser Imaging Detection and Ranging)[対象までの距離を検出する技術)と他のテクノロジーをどのように組み合わせての3D対象の検出方法を研究しています。


この論文では、自律航法、ハウスキーピングロボットなどで3D点群のオブジェクトを正確に検出する方法を説明しています。
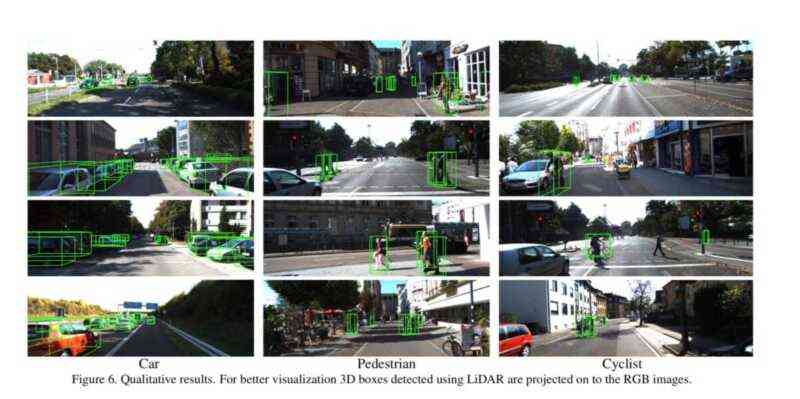
LiDARベースの3D検出における既存の方法のほとんどは、ベースは手作業による特徴表現、例えば鳥瞰図投影に頼っています。本論文では、そのボトルネックを解消し、ポイントクラウドベースの3D検出のための新しいトレーニング可能なエンドツーエンドのアーキテクチャであるVoxelNetを提案しています。
VoxelNetの検出に関する実験では、VoxelNetが最先端のLiDARベースの3D検出を性能的に大幅に上回ることがわかりました。歩行者やサイクリストの3D検出など、より困難な検出作業でもVoxelNetは、より良い結果を得ています。
このような技術がAppleの自立運転システムまたは自動運転電気自動車の開発に役立てられていると考えられます。
(via 9 to 5 Mac)




